

機械設計:什么是剛體?剛體模型與質點模型的區別與聯系
本文來源:力學酒吧公眾號(ID:Mechanics-Bar),作者:張偉偉 太原科技大學。
什么是剛體?剛體模型與質點模型兩者都是理想化模型。
剛體是指在運動中和受力作用后,形狀和大小不變,而且內部各點的相對位置不變的物體。剛體模型和質點模型的區別如下:
1、定義不同
剛體是指在運動中和受力作用后,形狀和大小不變,而且內部各點的相對位置不變的物體;
質點模型,是用一個具有同樣質量,但沒有大小和形狀的點來代替實際物體,這是對實際物體的一種科學抽象。
2、類別不同
剛體模型是物體;質點模型是一種抽象表達。
3、存在形式不同
絕對剛體實際上是不存在的,只是一種理想模型,因為任何物體在受力作用后,都或多或少地變形,如果變形的程度相對于物體本身幾何尺寸來說極為微小,在研究物體運動時變形就可以忽略不計;
質點模型只是對實際物體的一種科學抽象,是不存在的。
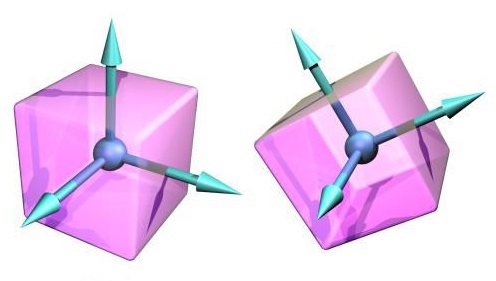
4.質點和剛體區別在它們的自由度上,點在空間只可能產生x,y,z三個方向的線位移,因此我們說質點有3個自由度;而對于剛體除了x,y,z三個方向的線位移外,還可以產生繞x,y,z三個軸的轉動,也成為角位移,因此我們稱剛體有6個自由度。
舉例來說,研究人造衛星的飛行軌跡,可以不考慮人造衛星的形狀和大小,將衛星簡化為質點來處理,它的位置可以用經度、維度和高度3個量來描述(即3個自由度)。假如在衛星上安裝一臺照相機,要對地面、或太空進行拍照,那么衛星的姿態就顯得比較重要了。此時僅用經度、維度和高度3個量描述衛星就不足以說明拍照對象和角度,除此3個量之外,還需要對衛星進行姿態描述。
歐拉 (Leonhard Euler,1707-1783) 最早 (1760年) 用進動角、章動角和自轉角(合稱歐拉角)描述了剛體在三維歐氏族空間的繞定點運動。考慮下圖所示藍色坐標系x,y,z為參考坐標系,紅色坐標系X,Y,Z是固定在剛體上,隨剛體一起運動,稱之為隨動坐標系。因此,認為紅色坐標系的運動就代表了剛體的運動。
請與下圖對應著看
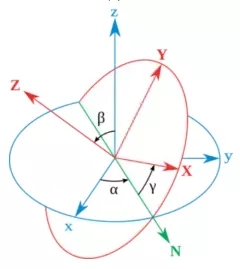
假如紅色坐標系的初始狀態與參考坐標系重合(可配合動圖理解),認為剛體運動可分解為三個步驟:
紅色坐標系繞oz軸(與oZ軸重合)旋轉α 角度,稱為進動角,此時oX軸轉至oN位置處;
繞紅色坐標系oN軸(即新的oX軸)旋轉β角度,稱為章動角,這樣oN垂直于zoZ平面的,稱oN為節線;
再繞新的oZ軸旋轉γ角度,稱為自轉角。如果通過節線可以比較清楚的定義三個角:
(1) 節線oN與參考坐標系ox軸的夾角為進動角α;
(2) 隨動坐標系oZ軸與參考坐標系oz軸的夾角為章動角β;
(3) 隨動坐標系oX軸與節線oN的夾角為自轉角γ。
進動角 (Precession)、章動角 (nutation)、自轉角 (intrinsic rotation) 是來自天文學的三個概念。我們以地球的運動來說明:例如地球繞自轉軸旋轉(下圖中綠色R標示),由此產生的角度就是自轉角;其次,由于地球在繞太陽公轉的同時還受到月球的吸引力,稱月球繞地球的旋轉平面為白道面,而地球繞太陽的旋轉為赤道面,由于赤道和白道之間有5o的差距,因此月球會對地球產生一個扭轉作用,致使地球在繞太陽公轉的方向上左右搖擺(下圖中紅色N標示),像是向太陽點頭一般,由此產生的角度改變稱為章動角;最后地球在高速自轉時,當外力產生的力矩矢與自轉軸不重合時就會產生進動,這種運動導致自轉角看起來像是在做圓錐擺動(下圖中藍色P標示,陀螺運動中經常會見到進動)。
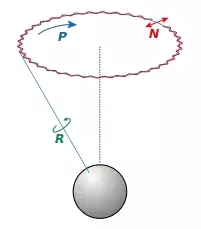
這種運動就是進動
在航天器中,進動角α,章動角β 和自轉角γ 通常稱為描述剛體的姿態角,在有的資料中α,β,γ也用ψ,θ,φ來表示。對于飛行中的飛機,其姿態調整通常采用偏航 (yaw),仰角 (pitch) 和滾動 (roll) 來描述(如下圖所示),它們也是歐拉角的一種。值得一提的是歐拉角并不是唯一的,選擇不同旋轉軸和轉動順序,可以產生24種不同的廣義歐拉角。
偏航/yaw

仰俯/pitch
滾動/roll
在理論力學上,歐拉角被用來描述剛體定點運動,將剛體的任意運動分解為定點(質心)的空間運動和剛體的定點運動合成,定點所代表的運動被稱為平動(物體上任何一點都具有和定點相同的運動),然后再利用歐拉角描述剛體的繞定點運動。
在剛體的學習中,很多質點的結論可推廣應用到剛體中。從靜力學角度考慮,一維情況下限制一個質點的運動,只需要在該方向上施加約束(或力);在二維平面內,需要2個約束(或力);再到三維空間則需要3個約束(或力)。如果對于剛體,一維情況下不需要考慮剛體轉動,只有該方向上的運動,此時剛體與質點情況一樣;在二維平面內,除2個方向上的約束外,還需要1個限制剛體旋轉的約束(或力偶);在三維空間內,就需要3個方向上的約束,加3個限制剛體旋轉的約束(或力偶)。如果把旋轉看作是一種廣義位移,力偶看作是廣義力,從建立控制方程上,剛體和質點沒有本質上的區別,只是方程數量增加,求解問題的復雜程度增加。
在這些結論在動力學中,也同樣適用。質點的動力學方程用牛頓第二定律表示為:

這里i 為1、2、3對應于x、y、z軸。對于剛體動力學問題,可分解為質心的動力學方程加剛體定點運動的動力學方程,成為:

這里i 仍為1、2、3對應于x、y、z軸,M 表示力偶,α 是角加速度,下標i 表示繞某軸的力偶或角加速度。J 被稱為轉動慣量,表達式是

式中,r 表示微元體ρdm到轉動軸的距離。在質點模型中,質量m 是衡量物體慣性大小的量,質量大,慣性就大,就更傾向于保持原運動狀態。
在剛體轉動中,轉動慣量J 就是衡量剛體發生轉動慣性大小的量,轉動慣量大,轉動慣性就大,表明保持原轉動特性的能力大。換言之,質量m 是表征線位移上慣性大小的指標,而轉動慣量是表征角位移上慣性大小的指標。實際上,描述剛體的轉動時,將描述質點的質量換成轉動慣量,將施加于質點的集中力換成力偶,質點動力學的大多數結論在剛體轉動中仍然成立。
在質點動力學中,將剛體轉動的J、M、α 視為廣義的m、F、a,質點動力學的許多結論可以適用于剛體轉動。例如質點平衡與剛體轉動平衡,動量定理與動量矩定義,能量守恒定律,沖量定律等等。盡管剛體與質點有這么多的相似,剛體力學的發展要晚質點力學許多,牛頓作為經典力學的奠基人仍不會求解剛體問題,到1760年(牛頓的《自然哲學的數學原理》成書于1687年)歐拉給出了歐拉角描述剛體的繞定點運動,到1765年發表《剛體運動理論》將剛體的運動分解為剛體上一點的運動與剛體繞該點的定點運動。但歐拉解決的是單個剛體的運動情況,對于由剛體組成的剛體系統問題則要借助1788年拉格朗日的《分析力學》,1834年哈密頓又將其推廣到了哈密頓力學(分析力學的另一種體系)。到20世紀,人們又開始關心運動的穩定性問題,由此引發了非線性動力系統的非線性特征和系統控制理論研究,直到今天,仍然是動力學系統研究的熱點問題之一。
以上就是100唯爾(100vr.com)小編為您介紹的關于什么是剛體的知識技巧了,學習以上的機械設計:什么是剛體?剛體模型與質點模型的區別與聯系知識,對于什么是剛體的幫助都是非常大的,這也是新手學習機械制造所需要注意的地方。如果使用100唯爾還有什么問題可以點擊右側人工服務,我們會有專業的人士來為您解答。
本站在轉載文章時均注明來源出處,轉載目的在于傳遞更多信息,未用于商業用途。如因本站的文章、圖片等在內容、版權或其它方面存在問題或異議,請與本站聯系(電話:0592-5551325,郵箱:help@onesoft.com.cn),本站將作妥善處理。
 向客服提問
向客服提問什么是剛體課程推薦














機械制造熱門資料


機械制造技術文檔


推薦閱讀